Precision Manufacturing Enabling Science to Change the World


Featured Products




Featured Categories

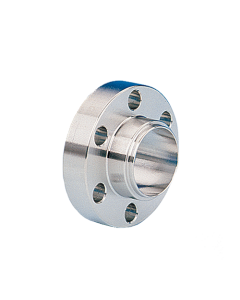
Flanges & Vacuum Components

Valves & Accessories

Feedthroughs & Breaks

Viewports & Glass
Featured Products
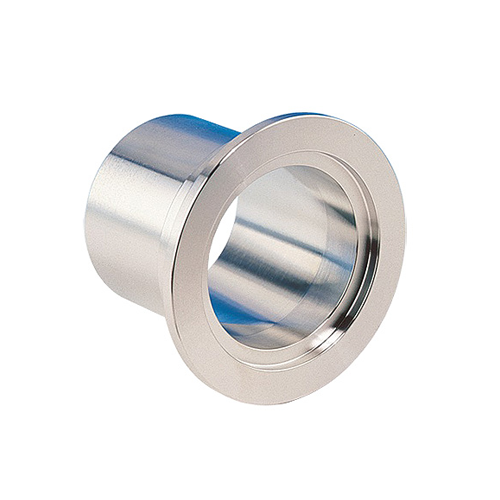
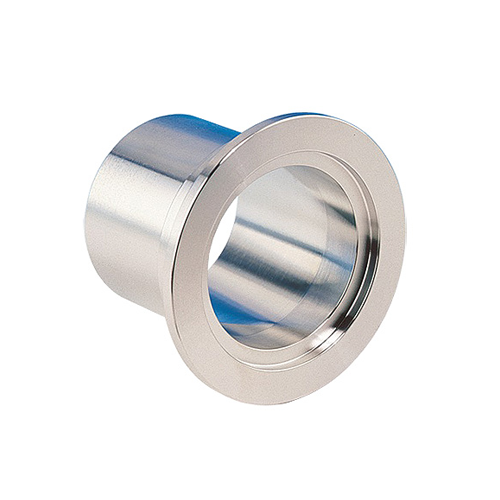
Short Weld Stub SKU: 715102


ISO-KF Flange SKU: 712001


O-ring, FKM Elastomer 2-116 SKU: 041116


Thermocouple/Miniature Connector, Type C SKU: 19923000

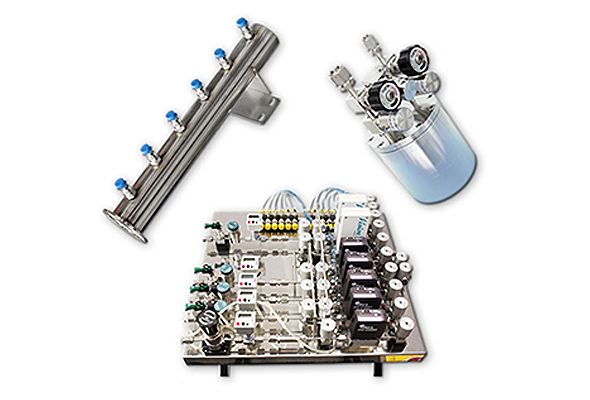
Market Solutions
Market Solutions
Enabling Science to Change the World
Since 1975, MDC has been a world leader in delivering genuine, high-quality products with the highest level of precision, purity, and performance to meet the most stringent manufacturing requirements. For over 46 years, we have been a trusted partner to major companies in the essential semiconductor, industrial, research, life sciences, aerospace, food processing, and fusion energy sectors. We proudly continue our legacy of providing the engineering expertise, precision manufacturing, and world-class support that enable our customers to innovate the advanced technologies that change the world.
To see how we can collaborate to develop integrated solutions for your most critical technological and manufacturing challenges:
· find global MDC Precision sales representatives
· request a quote for custom parts
The MDC Team is here to help and looks forward to connecting with you soon!
ISO Quality Management System
MDC maintains a documented quality management system designed and implemented to fulfill ISO 9001:2015 requirements. This system creates a framework for clearly defining the control of materials, processes, and verification activities, thus providing our customers with confidence that the design, manufacture, and servicing of MDC products are performed in a well-defined and controlled environment.
Our Mission
MDC commits to providing products, solutions, and services that set the industry standard for customer satisfaction in quality, delivery, and cost performance. Our goal is realized through teamwork involving customers, suppliers, and employees in continuous design and process improvements.